Rally Racing
Personal Projects

I am Jaylyn F. Daugherty, a dedicated and accomplished Mechanical Engineer with a profound passion for innovation and problem-solving. My journey in the field began with a B.S. in Mechanical Engineering, where my focus on mechatronics ignited my enthusiasm for pushing the boundaries of engineering.
Through various roles at esteemed technology companies, my experience spans a wide spectrum of mechanical engineering domains. Embracing a multidisciplinary approach, I engage in designing, prototyping, and testing mechatronic and mechanical solutions to difficult and varied problems. My proficiency with engineering tools such as SolidWorks, Fusion 360, and advanced simulation techniques empowers me to conduct comprehensive analysis and modeling of mechanical systems.
Amid my technical prowess, my unwavering dedication to innovation is fueled by a simple joy – witnessing my wild concept designs come to life as fully functional and deployed products. With a vision for a world where creativity and innovation converge seamlessly, I envision myself as an agent of positive change. Collaborating with like-minded professionals, I aim to make an enduring impact on the realm of Mechanical Engineering, Robotics and Product Design. Armed with dynamic technical skills, strategic insight, and unwavering passion, I love using my ever expanding skillset to solve difficult, important and impactful problems!
Functioned as a key leader on the engineering team tasked with bringing up a new Research
and Development team and facility located in Colorado. Led the efforts for commissioning
and redesigning new off-the-shelf pyrolysis machines used to accelerate the engineering team’s
testing cadence. Provided direction and implementation of building out a brand new facility
that is a critical expansion of the company's engineering bandwidth and resources. Built out a
team whose primary responsibility is designing low carbon impact biomass preparation
systems and processes. Provided engineering leadership in developing strategies for defining a
product roadmap to meet key business objectives in the direct carbon dioxide removal space.
Provided leadership and management of the mechanical engineering team responsible for the
design of a fruit harvesting robot. Managed the mechanical engineering team to ensure the
completion of critical design work in a timely manner. Worked with the Director of Hardware to
define longer term goals and the required timeline/resources needed to achieve those goals. Broke
down all weekly goals and priorities with the direct reports to provide them clear guidance on how
to achieve the company's higher level goals. Identified when larger cross-functional discussions are
required to ensure the direct reports design fully effective systems. Provided feedback to the
Director of Hardware when additional resources were needed in order to achieve our highest
priority tasks. Drove the efforts to create systems that ensured our design professionalism, such as
PLM, PDM as well as other “best practices” documentation. Held weekly one-on-ones with the
direct reports to help them with their individual growth paths to enrich their skillsets. Took on
large initiatives necessary for scaling company growth such as leading efforts to take designs from
prototype to full scale production.
Owned the design of arm and end effector assemblies of the fruit harvesting robot through all
aspects of the product life-cycle. Designed a new and novel cutting and gripping end effector for
the strawberry harvesting robot. The end effector has become a critical aspect to the companies
intellectual property and is moving forward through the patent process. Successfully redesigned and
adapted the current strawberry robot hardware into a grape harvesting configuration in under one
month. Developed a manufacturing strategy with the Director of Hardware to ensure we could
ramp up production of the robots from 15 prototype units to a production run of 100 robots.
Sourced, negotiated and down-selected a Contract Manufacturer to perform assembly of four large
subassemblies of the robot. Performed on-site training of the Contract Manufacturer in order to
ensure a quick and seamless ramp up into production. Assisted in the hiring and training of a
Senior Manufacturing Engineer in order to pass off the day-to-day manufacturing responsibilities
so that I could focus on Hardware R&D. Performed on farm testing and support of robots
including a month long deployment to England for extended testing. Worked with the Director of
Hardware to define requirements and develop architecture of the next fruit harvesting robot
design. Developed and down-selected concepts for four of the six major subsystems of the robot.
- Designed, prototyped, fabricated and tested a wide range of mechatronic solutions used in the automation of food production
- Used knowledge of the systems engineering approach to re-evaluate technologies on the machine and to further explore different architectures
- Synthesized and generated requirements in a relatively undefined space where the nature of the project could be ambiguous or not well documented in industry
- Coordinated efforts in a multidisciplinary team in order to ensure project timeline goals were met
- Worked closely in the selection of contractors. Lead the efforts to define scopes of work as well as working closely with them throughout projects in order to ensure the efforts yielded useful results
- Provided guidance to more junior members of the team in order to help them understand the projects at hand and to make them more effective members of the team
- Heavily involved in the hiring efforts of multiple disciplines to ensure we extended offers to only the best technical and cultural fits for our company
- Worked directly with a wide range of suppliers including food product suppliers in order to ensure we develop a good relationship with critical suppliers
- Provide mechanical engineering support in the design of complex systems used for production support
- Drive new product development, using mechanical and mechatronics expertise within Product Development Lifecycle and Systems Engineering frameworks.
- Perform advanced mechanical analysis for product design including tolerance studies, FEA, Fluid dynamics simulation and other mechanical simulation
- Utilize knowledge and experience in mechatronic system design to create product designs which utilize various actuators, sensors, database integrations and embedded software solutions
- Prototype product related components and design test fixtures to analyze new product designs
- Support engineering team with DFM reviews and creation of manufacturing plans for product designs and production engineering
- Perform and manage complex in-house manufacturing operations as well as complex assembly processes
- Complete Engineering documentation to Stringent Documentation Standards
- Provide general project management support such as order logistics, supplier sourcing, project scheduling and developing project objectives and specification
- Reviewing Arena PLM items and signing off under the Design Engineering team
- Design experiments and tests throughout the product development lifecycle, including Feasibility, Prelim Design, Detailed Design, DVT, and PVT.
- Coordinate with Test/Reliability Team manager to ensure efficient and adequate test design and timely completion of product testing. Reponsible for providing clear test requirements, specialized resources, deadlines, expected outputs, and data storage needs.
Designed mechatronic system for implementation in a retail environment, in a small team of two mechatronics engineers. Designed and programmed a capacitive sensor capable of reading a users hand through 1 Inch of wood. Utilized Cypress Semiconductors PSoC 5 architecture due to it's excellent built-in mixed signal features and CapSense functionality. Selected a geared DC brushed motor based on the loading conditions, under 40 dB requirement and tight size constraints. Went from design to initial prototype to production ready and installed in under 2 months. Aided in the assembly and installation of product. Worked directly with customer to set specifications and organize timeline.
Used knowledge in the manufacturing methods to write a program which aids in the quoting process. Standardized and calculated formulas for accurately and predictable determining run times of manufacturing processes. Aided in the implementation of a new ERP software adopted by the company. Used SQL database logic to transfer and improve data imported to the new ERP software. Designed equiptment to improve efficiency of various departments.
Propulsion R&D Testing and design. Designed an inertia dynamometer for starter motor testing.
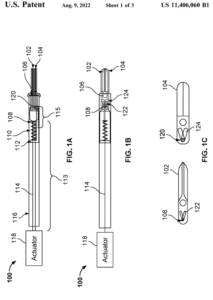
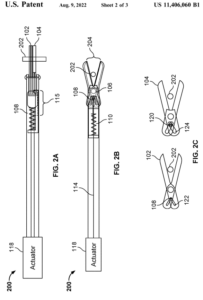
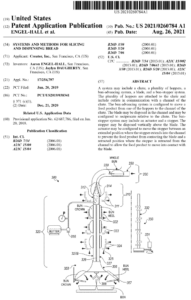
An end effector includes a cutting mechanism, a gripping mechanism, and a pivot component. The cutting mechanism and the gripping mechanism are coupled to the pivot component. The cutting mechanism is coupled to a first portion of the pivot component and the gripping mechanism is coupled to a second portion of the pivot component.

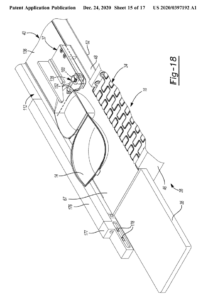
A tray apparatus includes an elongated platform and a tray mechanism. The tray mechanism includes a plate disposed onto the platform and an arm assembly coupled to the plate and including a post and an arm. The post is coupled to the plate and extends upwardly therefrom. The arm is rotatably coupled to the post between a first position and a second position. The plate receives a box containing foodstuffs from a conveyance apparatus. The plate moves in a first direction when moving from a first state toward a second state. The arm is configured to contact the box and rotate from the first position toward the second position when the plate is moving in the first direction. The arm is configured to contact and move the box in a second direction opposite the first along the platform when the plate moves from the second state toward the first state.
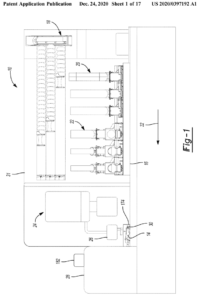
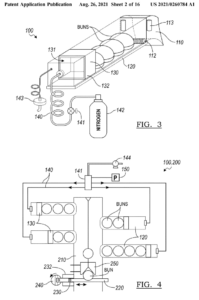
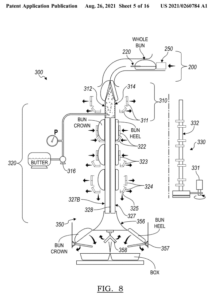
A system may include a chute, a plurality of hoppers, a bun-advancing system, a blade, and a bun-stopper system. The plurality of hoppers are attached to the chute and include outlets in communication with a channel of the chute. The bun-advancing system is configured to move a food product from one of the hoppers to the channel of the chute. The blade may be disposed in the channel and may be configured to reciprocate relative to the chute. The bun-stopper system may include an actuator and a stopper. The stopper may be disposed vertically above the blade. The actuator may be configured to move the stopper between an extended position where the stopper extends into the channel to prevent the food product from contacting the blade and a retracted position where the stopper is retracted from the channel to allow the food product to move into contact with the blade.
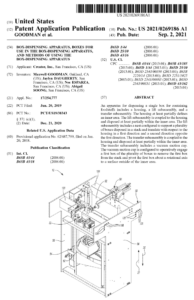
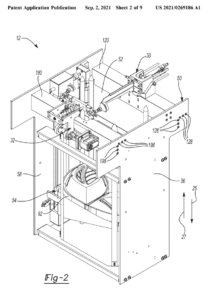
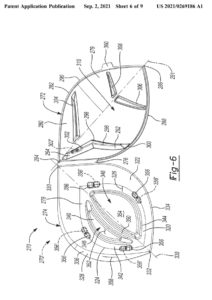
An apparatus for dispensing a single box for containing foodstuffs includes a housing, a lift subassembly, and a transfer subassembly. The housing at least partially defines an inner area. The lift subassembly is coupled to the housing and disposed at least partially within the inner area. The lift subassembly includes a nest configured to support a plurality of boxes disposed in a stack and translate with respect to the housing in a first direction and a second direction opposite the first direction. The transfer subassembly is coupled to the housing and disposed at least partially within the inner area. The transfer subassembly includes a vacuum suction cup. The vacuum suction cup is configured to operatively engage a first box of the plurality of boxes to remove the first box from the stack and pivot the first box about a rotational axis to a surface outside of the inner area.
I have so many interests outside of work that help me unwind and live a fulfilling life.
Here are some of my favorites!